[Paper Review] Image Super-Resolution via Iterative Refinement (SR3)
![[Paper Review] Image Super-Resolution via Iterative Refinement (SR3)](/content/images/size/w1200/2024/09/-----2024-09-10-203649.png)
지금 리뷰할 논문은 Diffusion을 이용한 Super-Resolution 방법 중 기초가 되는 SR3에 관한 논문이다.
해당 논문은 아래의 링크에서 확인할 수 있다.
참고한 글은 아래와 같다.
 Ffightingseok
Ffightingseok
0. Abstract
저자들은 SR3라는 image Super-Resolution via Repeated Refinement라는 접근을 소개한다.
SR3는 conditional image generation을 위해 DDPM(Denosing Diffusion Probabilistic Model)을 이용하며,
stochastic iterative denoising process를 통해 super-resolution을 수행한다.
SR3 Model의 output 생성은 다음과 같이 이루어진다:
pure Gaussian Noise에서 시작하여, various noise level에서 trained U-Net(Training)을 이용하여 iteratively하게 noise output $\epsilon$을 refine(Sampling)한다.
전반적인 모델의 동작과정은 다음과 같다.

SR3 Model은 on faces나 natural images를 대상으로 다양한 magnification factor에 대한 super-resolution task에 있어서는 강한 performance를 보인다.
human evaluation: standard 8x face super-resolution on CelebA-HQ compared with SOTA GAN methodsSR3: fool rate close to 50%SOTA GAN: fool rate of 34%
Cascaded image generation: super-resolution model들과 chainedImageNet: FID score of 11.3
1. Introduction
Super-Resolution은 LR(Low-Resolution)을 condition으로 주었을 때, HR(High-Resolution)의 distribution (or $\text{HR} - \text{LR}$)을 modeling하는Conditional Image Generation Task의 일종이다.
Single Image Super-Resolution은 다음의 I/O을 따른다:
Input: low-resolution imageOutput: high-resolution image
이러한 Super-resolution은 image-to-image translation task의 일종이며, inverse problem 중 하나이다.
Inverse Problem
다음과 같은 Linear한 Noise Model이 있다고 하자.
$$g(x, y) = H(f(x, y)) + \eta(x, y)$$
- $g(x, y)$: camera 취득 영상 (vector)
- $f(x, y)$: 육안으로 보고있는 simulator (vector)
- $H$: 왜곡되는 Degradation 과정 (Matrix)
- $\eta(x, y)$: Noise (vector)
이때, $f$는 원인이고 $g$는 결과이므로
$f \rightarrow g$:forwardprocess (Degradation)
$f \leftarrow g$:backwardprocess
$\hat{f} \leftarrow g$: inverse problem (Restroation)
즉, 결과(low-resolution image)인 $g$로부터 원인(high-resolution image)인 $f$를 예측해야 하므로, Super-Resolution Task는 inverse problem의 종류 중 하나이다.
그러나, 이러한 Super-Resolution은 다음의 사항들로 인해 challenging하다:
- 하나의 input(결과)에 대하여 다수의 output(원인)이 가능하다.
- 주어진 input에 대한 output의 conditional distribution이 간단한 parametric distribution을 따르지 않는다.
- e.g. multivariate gaussian과 같은 간단한 분포 X
기존에도 Deep Generative Model들을 이용하여 super-resolution과 같은 conditional task에 활용하는 경우가 있었다.
그러나 각 모델들은 다음의 이유로 한계점들이 있었다:
GAN: model collapse와 optimization instability를 다루기 위해 designed regularization과 optimization trick들을 매우 조심히 설정해야 한다
Autoregressive Models: HR image generation을 위해서는 expensive하다
NFandVAEs: sub-optimal sample quality를 생성한다
따라서 저자들은 SR3 (Super-Resolution via Iterative Refinement)이라는 새로운 접근법을 제안한다.
DDPM에 기반하여 U-Net에 간단하고 효과적인 modification을 통해 새롭게 conditional image generation task를 수행하는 것이다.
SR3 Model은 다음과 같은 상황들에도 잘 작동한다:
- 다양한 input resolution이나 magnification factor에도 잘 동작한다
SR3Model은 cascaded 될 수 있고, 더 efficient한 inference를 가능케 한다- $64 \times 64$에서 $256 \times 256$을 거쳤다가, $1024 \times 1024$로 가는 것이다.
- single large model보다 few small model을 train시키는 것이다.
- face와 natural image 모두 잘 동작한다
- unconditional generative model과 SR3를 chain하여 unconditional high fieldity의 image를 생성할 수 있다
SSIM이나 PSNR같은 Automated image quality score들은 human preference를 반영하지 못하는 문제가 있다.
따라서 저자들은 human evaluation으로 돌아가 super-resolution method의 quality를 평가한다.
2AFC라는 2-alternative forced-choice paradigm을 사용하는데, low-resolution image가 주어졌을 때 ground truth image와 model output 사이에서 선택하도록 하는 것이다.
이를 통해 fool rate score라는 지표를 계산하여 image quality와 model output consistency를 동시에 평가한다.
저자들은 이 score가 SOTA GAN method 들보다 더 높다고 주장한다.
1) SR3
DDPM을 conditional image generation task에 적용한 SR3 모델인 Super-resolution via iterative refinement를 제안한다.
2) different magnification factor on face and natural images
다양한 magnification factor에 대하여 face와 natural image 모두 잘 생성하며, 50%에 가까운 human fool rate를 보이며 34%인 FSRGAN과 PULSE를 압도한다.
3) unconditional and class-conditional generation
unconditional: $64 \times 64$ image synthesis model과 SR3 Model을 cascade하여 3-stage를 통해 $1024 \times 1024$ unconditional image를 생성
class-conditional: $64 \times 64$ image synthesis model과 SR3 Model을 cascade하여 2-stage를 통해 $256 \times 256$ class-conditional image를 생성
2. Conditional Denoising Diffusion Model
Super-Resolution Task는 LR을 Condition으로 하여, Gaussian Noise로부터 HR(or $\text{HR} - \text{LR}$)의 분포를 approximate하는 Conditional Image Generation Task이다.
Given Dataset$\mathcal{D}$: Input-Output Image pairs $\mathcal{D} = \left \{x_i, y_i \right \}_{i=1}^{N}$conditional distribution: $p(y | x)$에서 samplingone-to-many mapping: single source image $x$에 대응되는 many target image $y$
source image(LR)$x$를target image(HR)$y \in \mathcal{R}^d$로 mapping하는 iterative refinement process를 통해 parametric approximation $p(y|x)$을 학습한다.
Conditional DDPM: target image $y_0$를 $T$ refinement steps를 통해 생성pure gaussian noise$y_T \sim \mathcal{N}(0, \mathbf{I})$에서 시작iterative refinement를 통해 $(y_{T-1}, y_{T-2}, \cdots, y_0)$ target image $y_0$를 samplinglearned conditional distributions$p_\theta(y_{t-1}|y_t, x)$을 통해 $y_0 \sim p(y | x)$를 수행
-forward diffusion process(Signal to Noise): Markov chain을 통해 Gaussian Noise를 signal에 점진적으로 더해준다. ($q(y_t | y_{t-1})$)
-reverse denoising process(Noise to Signal): $x$에 conditioned된 reverse markov chain을 통해 noise에서 signal을 recover한다.
사실 Forward Diffusion Process에서도 $x$에 conditioned된 markov chain을 사용할 수는 있지만, 저자들은 이를 future work로 남겨놓았다.
neural denoising model $f_\theta$를 reverse markov chain을 통해 학습한다.
- source image $x$를 condition으로 받는다
- noisy target image $y_t$를 input으로 받는다
- time step $t-1$에서의 noise를 output으로 예측한다
2.1 ~ 2.3까지의 내용은 기존 DDPM의 수식에 Condition $x$가 추가로 들어가기만 한 거라 자세한 설명은 생략한다.
보다 더 자세한 설명을 원한다면 아래의 포스트를 참고하자.

2.1) Gaussian Forward Diffusion Process
Confusion Point!
- $q(\mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0) = \mathcal{N}(\mathbf{x}_{t-1}; \tilde{\mu}_t(\mathbf{x}_t,\mathbf{x}_0), \tilde{\beta}_t I)$
- Bayes' Rule을 통해 3개의 Gaussian을 다 전개하여 $\tilde{\mu}_t$, $\tilde{\beta}_t$에 대한 식을 직접 구함
- Variance $\tilde{\beta}_t I$는 수식을 통해 직접 유도
- $p_{\theta}(\mathbf{x}_{t-1}|\mathbf{x}_{t}) = \mathcal{N}(\mathbf{x}_{t-1}; \mu_{\theta}(\mathbf{x}_t, t), \Sigma_{\theta}(\mathbf{x}_{t}, t))$
- Variance $\Sigma_{\theta}$를 time-dependent constant로 fix 시킴
- Mean $\mu_{\theta}$만 variable로 처리하여 Loss Function을 Simplify
즉, 실제로 Variance를 constant로 fix 시키는 부분은 $p_{\theta}(\mathbf{x}_{t-1}|\mathbf{x}_{t})$만 해당되는 것이다.
Reverse Process와는 다르게 Forward Process에서는 Source Image(LR) $x$를 conditioning하지 않는다.
2.2) Optimizing the Denoising Model
Neural denoising model $f_\theta(x, \tilde{y}, \gamma)$의 input은 다음과 같다.
- $x$: LR, Conditioning되는
Source Image - $\tilde{y}$:
Noisy Target Image($\mathbf{y}_t$와 동일하게 취급) - $\gamma$:
Varianceof noise ($\gamma = \prod_{t=1}^{T}\alpha$)
Noise Vector $\epsilon$을 예측하여 iterative refinement를 통해 Noiseless Target Image $y_0$를 recover하는 것이다.
Neural denoising model $f_\theta(x, \tilde{y}, \gamma)$의 training objective는 다음과 같다.
$$\mathbb{E}_{(\mathbf{x},\mathbf{y})}\mathbb{E}_{\epsilon,\gamma}\left|\left[f_\theta\left(\mathbf{x}, \underbrace{\sqrt{\gamma}\mathbf{y}_0 + \sqrt{1-\gamma}\epsilon}_{\tilde{y}},\gamma\right) - \epsilon\right]\right|_p^p$$
- 1) variance $\gamma = \prod_{t=1}^{T}\alpha$의 값($\gamma \sim p(\gamma))$에 따라 model과 generated output의 quality 차이가 크게 달라진다.
- distribution $\gamma$가 big impact를 행사한다.
- 2) $f_\theta$가 $\epsilon$이 아니라 $y_0$를 예측하도록 ($\epsilon$을 $y_t, y_0$의 식으로 변환) 하면, loss function의 scale을 변화시킨다.
- 기존의 식처럼 $\tilde{\mu}_t(\mathbf{y}_t, \mathbf{y}_0)$에서 $\mathbf{y}_0$를 $\mathbf{y}_t$와 $\epsilon$의 식으로 변형하지 않는다.
따라서 아래의 Algorithm1과 같이 Noise vector간의 Loss를 기반으로 Gradient step이 이루어진다.

2.3) Inference via Iterative Refinement
- Reverse Process:
pure gaussian noise
$$p(\mathbf{y}_T) = \mathcal{N}(\mathbf{y}_{T}; \mathbf{0}, \mathbf{I})$$
- Reverse Process:
single step
$$p_{\theta}(\mathbf{y}_{t-1}|\mathbf{y}_{t}, \mathbf{x}) = \mathcal{N}(\mathbf{y}_{t-1}; \mu_{\theta}(\mathbf{y}_t, \mathbf{x}, \gamma_t), \sigma^2\mathbf{I})$$
- Reverse Process:
Joint Distribution
$$p_{\theta}(\mathbf{y}_{0:T}| \mathbf{x}) = p(\mathbf{y}_T)\prod_{t=1}^{T}p_{\theta}(\mathbf{y}_{t-1}|\mathbf{y}_{t}, \mathbf{x})$$
Forward Process의 Noise Variance가 가능한 한 작게 설정된다면($\beta_t \sim 0$),즉 $\alpha_{1:T} \sim 1$이 되면 $p_{\theta}(\mathbf{y}_{t-1}|\mathbf{y}_{t}, \mathbf{x})$가 approximately하게 Gaussian을 따른다.$$p_{\theta}(\mathbf{y}_{t-1}|\mathbf{y}_{t}, \mathbf{x}) = \mathcal{N}(\mathbf{y}_{t-1}; \mu_{\theta}(\mathbf{y}_t, \mathbf{x}, \gamma_t), \sigma^2\mathbf{I})$$
의 기존의 식에서 $\mathbf{y}_{t-1} \sim p_{\theta}(\mathbf{y}_{t-1}|\mathbf{y}_{t}, \mathbf{x})$와 같이 sampling이 가능하다.
Re-parameterization trick을 통해 다음과 같이 iterative하게 input signal $\mathbf{y}_0$을 sampling할 수 있다.
$$\mathbf{y}_{t-1} = \mu_{\theta}(\mathbf{y}_t, \mathbf{x}, \gamma_t) + \sigma_t \epsilon$$
이때, Mean $\mu_{\theta}(\mathbf{y}_t, \mathbf{x}, \gamma_t)$과 Variance $\sigma_t^2 $는 다음의 과정을 통해 구한다.
Mean$\mu_{\theta}(\mathbf{y}_t, \mathbf{x}, \gamma_t)$: $\mathbf{y}_t, \hat{y}_0, \epsilon (=f_\theta)$의 3개 항에 대한 식이므로 $\hat{y}_0$를 제거하여 2개의 항에 대한 식으로 변환한다.Variance$\sigma_t^2 = \beta_t = 1 - \alpha_t$ 와 같이 time-dependent constant로 설정한다.
$$\hat{y}_0 = \frac{1}{\sqrt{\gamma_t}} \left(y_t - \sqrt{1 - \gamma_t} f_\theta(x, y_t, \gamma_t)\right)$$
위의 식을 이용하여 $\hat{y}_0$를 제거하고 $\mathbf{y}_t, \epsilon (=f_\theta)$ 2개 항에 대한 식으로 $\mu_\theta(x, y_t, \gamma_t)$를 정리한다.
$$\mu_\theta(x, y_t, \gamma_t) = \frac{1}{\sqrt{\alpha_t}} \left(y_t - \frac{1 - \alpha_t}{\sqrt{1 - \gamma_t}} f_\theta(x, y_t, \gamma_t)\right)$$
따라서 다음과 같이 $p_{\theta}(\mathbf{y}_{t-1}|\mathbf{y}_{t}, \mathbf{x})$에서 sampling이 가능하다.
$$\mathbf{y}_{t-1} = \mu_{\theta}(\mathbf{y}_t, \mathbf{x}, \gamma_t) + \sigma_t \epsilon$$
$$y_{t-1} \leftarrow \frac{1}{\sqrt{\alpha_t}} \left(y_t - \frac{1 - \alpha_t}{\sqrt{1 - \gamma_t}} f_\theta(x, y_t, \gamma_t)\right) + \sqrt{1 - \alpha_t}\epsilon_t$$
위의 과정을 모든 time step에 대해 반복하여 iterative refinement를 수행하면 input signal $y_0$를 sampling 할 수 있다.
따라서 아래의 Algorithm2와 같이 iterative refinement를 수행하는 inference 과정을 나타낼 수 있다.

2.4) SR3 Model Architecture and Noise Schedule
SR3 Model은 기존 DDPM Architecture에 있는 U-Net Structure와 비슷하다.
다만 여기서 일부분 수정이 들어가는데:
- DDPM의 residual block을
BigGAN의 residual block로 대체한다.
- skip-connection을 $\frac {1}{\sqrt{2}}$배로
re-scale한다.
- different resolution에서의 residual block의 개수, channel multiplier들을 증가시킨다.

- Source Image $x$를 Model에 conditioning하는 방법
LR source image $x$를 bicubic interpolation을 통해 HR target image $y_t$와 동일한 resolution으로 upsample한다.
이후 upsample된 $x$와 target image $y_t$를 channel dimension에 따라 concatenate하여 U-Net의 input으로 넣고, output으로는 $y_{t-1}$을 얻는다.

Training noise schedule에 대해서는 $\gamma$에 대한 piece-wise distribution을 사용한다.
$$p(\gamma) = \sum_{t=1}^T \frac{1}{T} U(\gamma_{t-1}, \gamma_t)$$
1) time step $t \sim \left \{ 0, \cdots, T\right\}$를 uniform하게 sampling한다.
2) $\gamma \sim U(\gamma_{t-1}, \gamma_t)$
저자들은 모든 experiment에 대하여 $T=1000$으로 설정했다.
Inference에서는 이전의 diffusion model들이 1~2k diffusion step들을 요구했으나, 이는 large target resolution task에 대해서는 slow generation이 일어난다.
따라서 저자들은 $t$가 아니라, $\gamma$에 직접적으로 condition을 주는 방식을 채택하여 diffusion step의 수와 inference도중 noise scheduling을 결정한다.
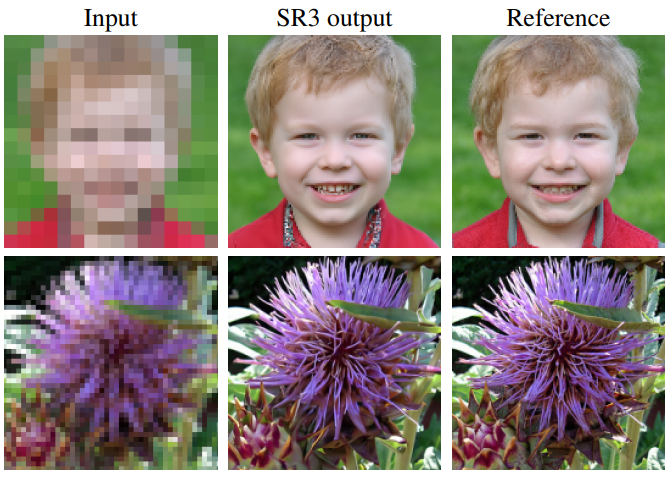
4. Experiments
- Natural Images
다음은 ImageNet에서 학습한 SR3 Model($64 \times 64 \rightarrow 256 \times 256$)을 Test Data에 대해 평가한 것이다.

- Face Images
다음은 FFHQ에서 학습한 SR3 model($64 \times 64 \rightarrow 512 \times 512$)을 학습 셋에 포함되지 않는 이미지에서 평가한 것이다.

![[Paper Review] Diffusion Models Beat GANs on Image Synthesis](/content/images/size/w960/2024/07/Screenshot-2024-08-01-at-05.49.39.png)
![[Paper Review] CTAB-GAN: Effective Table Data Synthesizing](/content/images/size/w960/2024/07/Screenshot-2024-07-28-at-07.39.16.png)
![[Paper Review] Denoising Diffusion Implicit Models (DDIM)](/content/images/size/w960/2024/07/-----2024-07-24-174331.png)
![[Paper Review] CTGAN: Modeling Tabular Data using Conditional GAN](/content/images/size/w960/2024/07/-----2024-07-21-073107.png)